
Als stolzer Besitzer eines 20 Watt Fiber Lasers von EM-Smart (ich bekomme nichts für die Werbung. Ich finde das Gerät einfach gut) war ich von Beginn an zufrieden mit der Leistungsfähigkeit und den vielfältigen Funktionen des Geräts.
Für alle mit dem gleichen Gerät gibts hier eine kleine Datenbank mit Einstellungen und Bildern zu meinen Projekten und Materialien etc.:
Database EM-Smart 20W
Aber irgendwas findet man ja immer, dass einen stört: die manuelle Kurbel zur Höhenverstellung des Laserkopfs. Daher entschloss ich mich, eine automatisierte Lösung, den „LaserLift“, zu entwickeln.
Und ja, ich weiß, dass es das auch fertig zu kaufen gibt. Aber die Laser kosten dann leider mindestens das doppelte 😀

Funktion
- Höhenänderung mit einem Stepper Motor
- Encoder zur genauen justierung
- Display zur Anzeige
Ich habe als Grundlage das TableRouter Shield verwendet. Es funktioniert aber auch jedes andere Shield. Dann müsste man aber evtl. die Pins anpassen. Für die Steuerung ist ein ESP32 zuständig. Diese wertet die Signale des Encoders aus und bewegt den Motor dann entsprechend.
Ein automatischer Fokus des Lasers auf die richtige Höhe ist nicht inbegriffen. Ist aber definitiv noch eine nette Erweiterung. Falls jemand Ideen hat, wie das einfach umzusetzen ist, gerne her damit.
Was wird benötigt?
- 1x Table Router Shield mit einem ESP32 Devkit V1 (es kann aber auch ein anderes Shield genutzt werden)
- 1x 5V Encoder(4Pin) – Amazon | Aliexpress
- 1x Display I2C 0,96Zoll – Amazon | Aliexpress
- 1 x 14 mm An/Aus Schalter – Ansonsten das Loch einfach anpassen (Step und f3d gibts auf Thingi)
- 1 x 11,5 mm 12V Buchse – Aliexpress Ansonsten das Loch einfach anpassen (Step und f3d gibts auf Thingi)
- 1 x Nema 17 Stepper Motor. Ich würde schon 59NM nehmen. Es wird schon Kraft benötigt.
- paar M3 Schrauben
- 2 x M5 Schrauben zur Befestigung des ganzen Gehäuses am Laser
- M3 Einpressgewinde 3D Druck 5 mm Durchmesser und max. 5 mm lang
- 1 x 12V Netzteil mit etwa 2A
- 1 x Koppler für den Stepper. Die Spindel am Laser war bei mir 10 mm und der Stepper hatte 5 mm. Den Koppler entsprechend bestellen.
- Gehäuse auf Thingi
Zusammenbau – Bilderstrecke
Der Zusammenbau sollte eigentlich selbsterklärend sein. Daher gibts hier nur eine Bilderstrecke.
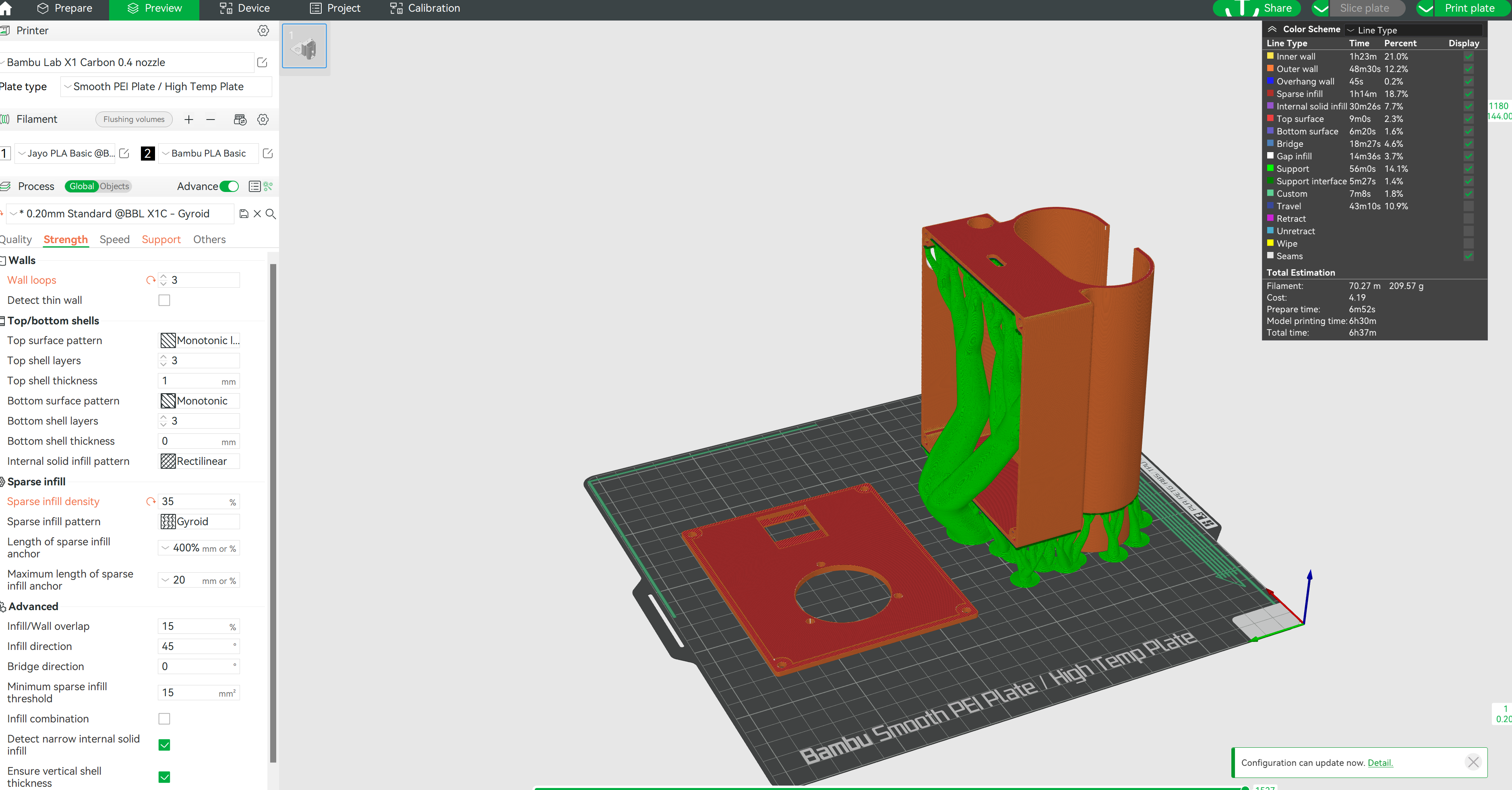
Ich habs so herum gedruckt und Tree Support eingesetzt. Hat super geklappt.
Der Nema 17 wird von unten mit den Schrauben befestigt.
Die 12V Buche und der Schalter werden einfach eingesteckt

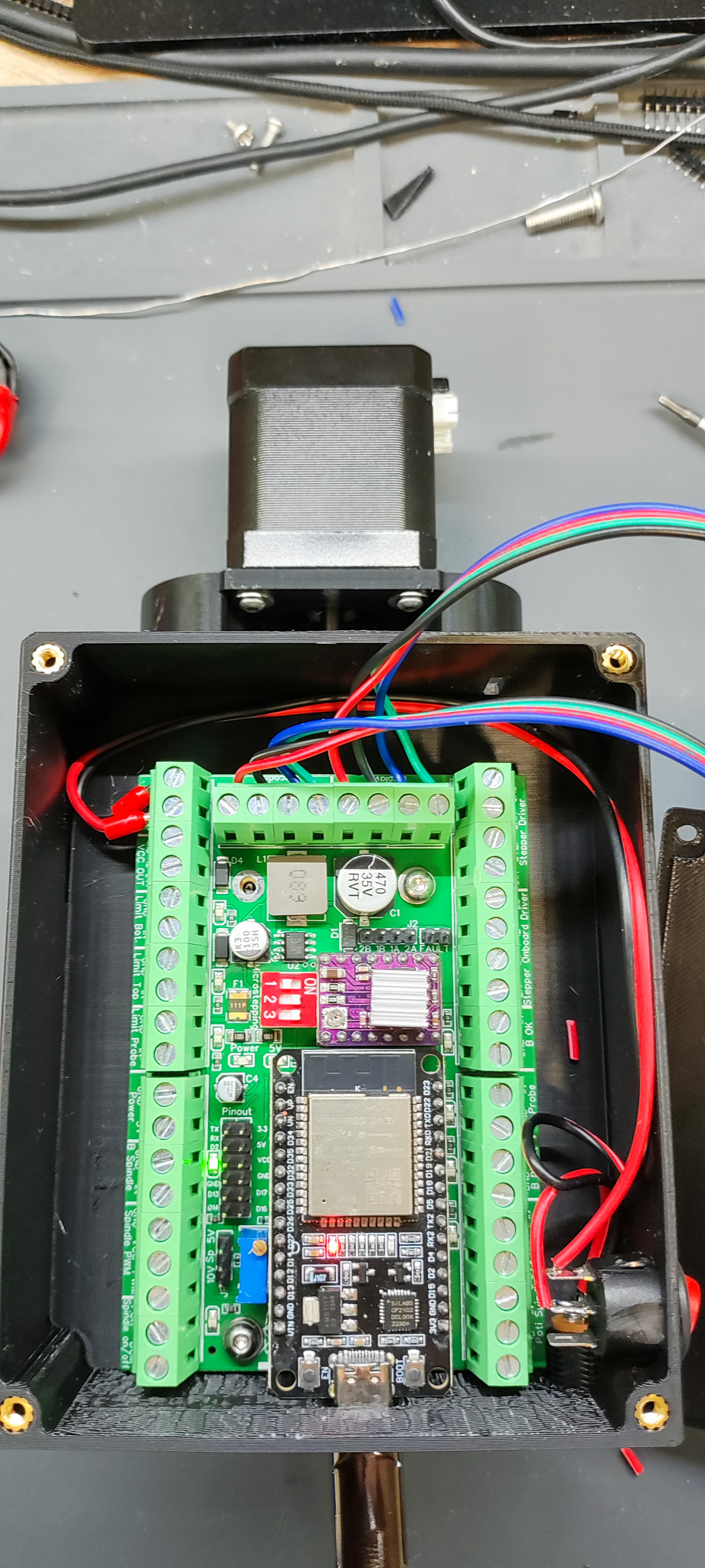
Shield festschrauben. Kabel von der 12V Eingangsbuchse erst zum Schalter und dann weiter zum Stromeingang vom Shield. Display und Encoder an die beschrifteten Eingänge am Shield.
Den Stepper Motor habe ich ebenfalls einzeln am Shield aufgelegt.


Dann alles zusammen setzen, Software aufspielen… und fertig.
Software
Die Software für den ESP32 habe ich auf Github geladen. Dort findet sich auch ein Link zum Webinstaller. Dann muss man die Software nicht händisch herunterladen und kompilieren, sondern kann das direkt aus dem Webinterface heraus. Das sollte für 99 % der Fälle genügen. Lediglich, wenn man Anpassungen machen möchte oder die Einstellungen ändern möchte, muss die Software heruntergeladen und lokal kompiliert werden.
Default Einstellungen:
Microstepping auf 1/4(800 Steps pro Umdrehung) -> Bei DRV8825: LOW|HIGH|LOW