Eingestellt
Update 01.05.2024: Das OPEN-CNC-Shield 1 wird nicht mehr weiterentwickelt / unterstützt / verkauft. Schau gern beim Nachfolger, dem OPEN-CNC-Shield 2 vorbei.
Allgemein
Beschreibung
Hier ist ein kurzes Video zur Vorstellung des OPEN-CNC-Shields:
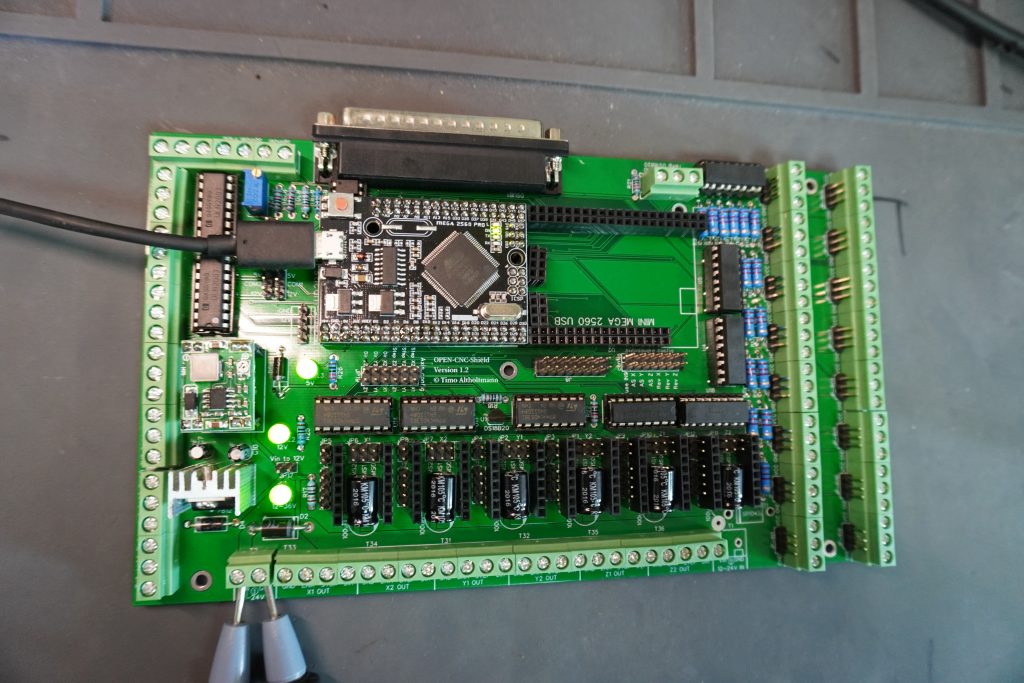
Das OPEN-CNC-Shield ist ein weiteres CNC-Shield. Es soll sowohl für Anfänger, welche zunächst mit DIY Fräsen und Aufstecktreibern arbeiten als auch für Fortgeschrittene mit externen Treibern funktionieren. Es bietet sich auch an, Ersteinmal klein anzufangen und Stück für Stück weiter aufzurüsten, ohne jedes Mal ein neues Shield kaufen zu müssen.
„OPEN“, weil es mit diversen Schnittstellen einfach erweiterbar sein soll. Darüber hinaus bietet es sehr vielfältige Möglichkeiten der Anpassung, siehe dazu die Liste der Funktionen. Es vereint außerdem das Tillboard mit der Tillboard Extension, sodass man für die ganzen Funktionen nur noch diese eine Platine benötigt.
Vielfältiger Softwareeinsatz möglich. Es kann unter anderem Estlcam, LinuxCNC oder auch Mega GRBL um z.B. LaserGRBL in Verbindung mit einem Laser anstatt eines Fräsers zu nutzen verwendet werden.
Funktionen
- Zwei Arduino Mega pro mini zur Steuerung(optional, je nachdem was man möchte)
- Einer wird direkt mit Estlcam bzw. dem PC verbunden. GRBL für z.B. Laser oder Betrieb durch Estlcam möglich.
- Der andere Arduino steuert die Funktionen drum herum und kann frei programmiert werden.
- Steuerung von bis zu 6 individuellen Stepper Motoren
- Für den Betrieb von Estlcam können die Achsen über Jumper verbunden werden, sodass nachher pro Achse(x, y, z) zwei Motoren gesteuert werden können
- Möchte man andere Software nutzen, welche mehr Achsen unterstützt geht dies auch, indem man die Jumper nicht setzt. Dann könnten theoretisch 6 Achsen verfahren werden, wobei jede Achse einen Motor hat.
- Linux CNC Anschluss
- Möchte man LinuxCNC verwenden kann der Arduino entfernt werden und eine Adapter Platine eingesteckt werden. Dann stehen 2 LPT/Parallel Port Anschlüsse für die Verwendung mit LinuxCNC zur Verfügung
- Folgende Funktionen stehen dann in LinuxCNC zur Verfügung:
- Verfahren von 4 individuellen Achsen
- Spindel On/Off
- Spindel Geschwindigkeit
- Enable der Treiber
- Ausgang 1-4
- Eingang 1-16
- Poti für Spindel Geschwindigkeit
- Poti für Vorschub
- Stepper Treiber können entweder aufgesteckt werden(A4988 oder DRV8825) oder es können externe Treiber verwendet werden
- Jeder Treiber/Achsen Anschluss kann mit einem eigenen Endstopp versehen werden
- Autosquaring kann für alle Achsen(X, Y und Z) individuell aktiviert werden
- Beim Autosquaring werden die Endstopps jedes Stepper-Motors angefahren. Dies soll Rechtwinkligkeit sicherstellen. Vor allem auf selbstgebauten CNC-Fräsen wie der MPCNC ist das sehr nützlich. Dazu hier ein Video mit Erklärung: MPCNC – Autosquare nachrüsten
- Ausgabe des Autosquaring Status über ein Display möglich
- Onboard Temperatur Sensor, hiermit kann ein 12V Lüfter temperaturabhängig angesteuert werden
- 12V Lüfter Anschluss (PWM – 4 polig)
- Hier kann entweder ein 12V PWM Lüfter angeschlossen werden
- oder ein 12V 3Pin Lüfter
- oder ein 12V 2Pin Lüfter
- 12-24V Strom Eingang
- 8 Ausgänge, welche entweder mit 12V oder 5V geschaltet werden. Alternativ kann man auch selbst Spannung zur Verfügung stellen. Dabei schalten immer 4 Stück mit der gleichen Spannung. Als Beispiel: Ausgang 1-4 mit 5V und Ausgang 5-8 mit 12V.
- 16 Eingänge. An jedem Eingang kann über einen Jumper gesteuert werden, wie diese Schalten.
- Entweder, indem GND an dem Eingang anliegt,
- oder, indem eine Spannung zwischen 5V und 24V anliegt
- Ausgang für Spindel Geschwindigkeit und Spindel an/aus(Laser wird auch unterstützt)
- Über Jumper konfigurierbar, ob ein PWM Signal ausgegeben wird, oder ein analoges Signal zwischen 0-5V oder 0-10V
- Eingang für einen oder mehrere externe Temperatur-Sensoren
- SUB-D 37 Ausgang zum Anschluss eines Bedienpanels
- Dieses kann entweder per Kabel verbunden werden, oder per Funk
- Durch die Verwendung eines zweiten, frei Programmierbaren Arduino ergeben sich zum Beispiel folgende Möglichkeiten:
- Zeitgesteuerte Ansteuerung von Relais
- Reagieren auf Ereignisse
- Schalte Absaugung ein, wenn Spindel Motor startet und lasse diesen 30 Sekunden nachlaufen
- Schalte Kühlung ein, sobald der Spindel Motor läuft
- Spiel die Super Mario Melodie auf einem Lautsprecher, wenn das Fräsprogramm startet
- Steuerung von Kühlmittelanlagen / Schmierungen usw.
- und vieles mehr…..
Technische Daten
| Eingangsspannung | 12-24V (24V empfohlen) |
| Eingangsstromstärke | 2 Terminals mit max 10A pro Terminal. Bei Verwendung externer Treiber sollte ein 3A Netzteil ausreichen. Bei Verwendung von Aufstecktreibern sollten 10A ausreichen. |
| Ausgänge | 8 Stück mit 5V oder 12V oder selbst angelegter Spannung. 4 Stück werden immer mit gleicher Spannung betrieben. Beispiel: Ausgang 1-4 mit 5V und Ausgang 5-8 mit 12V. Im 5V Netz stehen maximal 3A zur Verfügung, wobei die onBoard Bauteile schon etwa 200mA benötigen. Falls ein externes Bedienpanel angeschlossen ist erhöht sich das noch weiter. Im 12V Netz stehen ebenfalls maximal 3A zur Verfügung. Pro Ausgang dürfen maximal 500mA Strom fließen. Also hier immer mit Relais arbeiten, falls mehr Strom benötigt wird. |
| Eingänge | 16 Stück Schaltung entweder mit positiver Spannung zwischen 5V und 24V oder mit Masse(GND). Wählbar über Jumper für jeden Eingang. |
| Anschlüsse | – Anschlussterminals für 6 externe Treiber – SUB-D 37 Anschluss für externes Bedienpanel, Joysticks, Handrad usw. – 4Pin 12V PWM Lüfter anschluss – DS18B20 Temperatur Sensoren anschluss – Spindel On/Off – Spindel Geschwindigkeit (PWM / Analaog 0-5V oder 0-10V) |
Platine / Bauteile besorgen
Falls Du keine Lust hast die Platine und Bauteile selbst zu besorgen gehts hier zu meinem Shop.
Möchtest Du die Platine allerdings lieber selbst fertigen ist dies auch möglich. Die Dateien stehen unter der Creative Commons CC BY-NC-SA 4.0 Lizenz und können hier heruntergeladen werden: Gitlab – Timos Werkstatt
Ich empfehle die Platine mit einem „Copper Weight“ von 2 oz zu produzieren. Falls alle Aufstecktreiber verwendet werden und mit viel Strom versorgt werden müssen, sollte dies besser für die Wärmeentwicklung sein.
Außerdem nehme ich immer ein ENIG-RoHS – Finish. Dies verbessert die Oberflächenqualität und erleichtert das Löten.
Teilelisten
Hier gehts zu den Teilelisten in Form einer —> Google Docs Tabelle
Über den Reiter oben kann zwischen den verschiedenen Platinen gewechselt werden
Erweiterungen / Zubehör
| Bild | Beschreibung |
|---|---|
 | Fanmount / Lüfterhalter für den 3D-Drucker. Dank an Elias Ruemmler für das Design. Ein Lüfter für die Platine wird nur benötigt, wenn die Aufstecktreiber verwendet werden. Hier gehts zur Erklärung: https://100prznt.de/cnc/fanmount-for-open-cnc-shield/ und hier gibts direkt die STL https://www.prusaprinters.org/prints/41531-fanmount-for-open-cnc-shield |
 | LowRider2 – case for Open-CNC-Shield von Massimiliano Mandato Hier der Link https://www.thingiverse.com/thing:4627211 |
 | Mounting Frame für das Open CNC Shield von ironman-139. Einfach drucken und M3 Einpressmuttern verwenden. Hier der Link: https://www.thingiverse.com/thing:4861220 |
 | Dies ist eine Mountingplate für das Open CNC-Shield, zum einfachen Einbau in einen Schaltschrank von Varosch. Hier der Link: https://www.thingiverse.com/thing:4713574 |
Zusammenbau / Löten
Die Zusammenbau-Anleitung ist hier zu finden → Zusammenbau
Dokumentation
Zur Dokumentation gehts hier entlang → Dokumentation
Moin ist es auch möglich das Display vom der Wirelesscontrol direkt am CNC Shield oder am 2ten Arduino anzuschließen?
Würde gerne die Temperatur vom DS18b20 ohne wirelesscontroll sehen
Ja, dafür musst du ins pinout vom dsub37 gucken und das Display an die entsprechenden Pins anschließen
Hallo,
erstmal Gratulation zu deinem Projekt. Bin begeistert. Ich baue gerade die MPCNC Primo und auf der Suche nach Steuerungen bin ich auf deiner Seite hängengeblieben.
Ich bin leider noch etwas verwirrt, was deine Platine und das Tillboard+Extensions angeht. Vielleicht kannst du mich kurz aufklären. Wenn ich das Open CNC Shield mit Kabelferbedienung bauen möchte, was brauche ich für Boards?
Ansonsten noch mals Respekt. Tolle Arbeit.
Mfg Thomas
Halloa, du bräuchtest das OPEN-CNC Shield und das D-SUB Kabel. Wenn du die kabel nicht einzeln auflegen willst, würde ich noch die das Extension Panel dazu nehmen. Das dient quasi als breakout für den D-SUB Anschluss.
Hallo,
kann mir einer mal die Maße der Platine geben?
Habe bei https://gitlab.com/ das DXF File geladen, das
ist beim Import 8.385mm x 4.842mm groß….
Würde gerne ein Gehäuse erstellen, das sich auch auf
einem kl. Drucker herstellen lässt.
Die Platine ist 213 mm x 123 mm
Hatte ähnliche Probleme, allerdings meist Lötpunkte direkt an Masse. Hab die dann mit höherer Temperatur nachgelötet. Möglicherweise wird an diesen Punkten die Wärme zu stark abgeleitet, da Massepunkte oft mit großer Fläche verbunden sind.