Hey Leute, ich möchte euch heute den aktuellen Stand meines ControllerModuls für LinuxCNC mit der Mesa 7i92t vorstellen. Leider fehlt mir momentan die Zeit, das Projekt weiterzuentwickeln. Deshalb teile ich hier alles, was ich bisher geschafft habe – vielleicht kann ja jemand von euch etwas damit anfangen und es weiter nutzen.
Was bisher funktioniert:
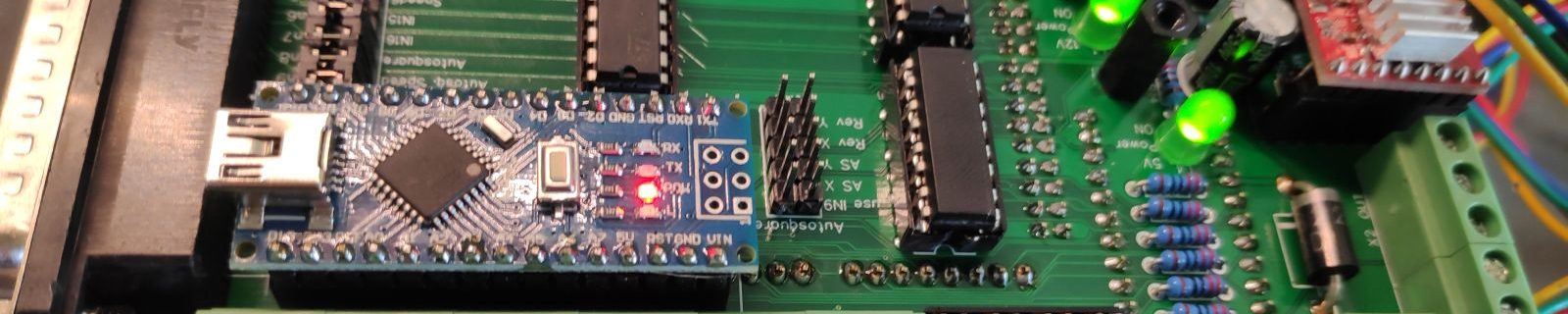
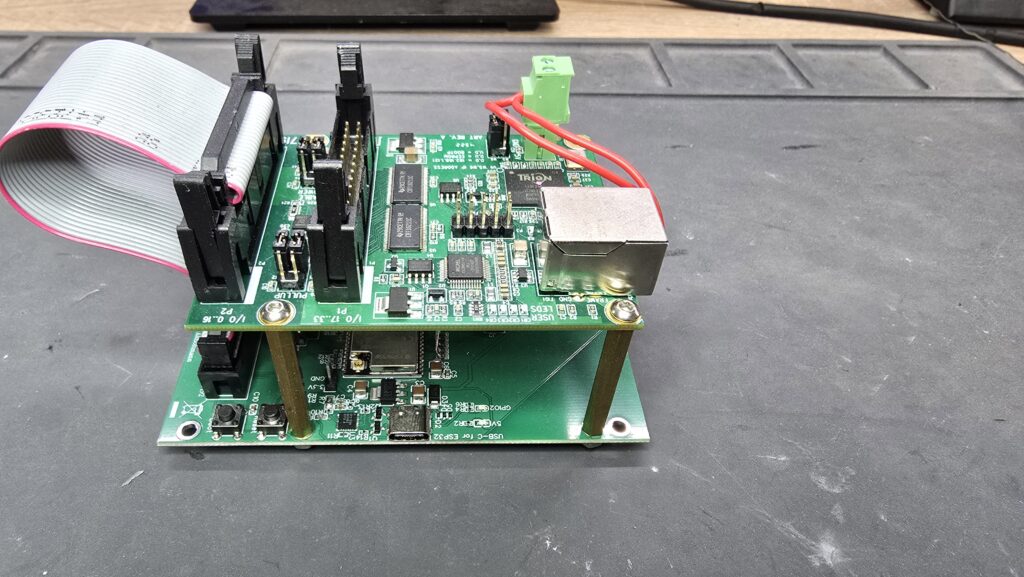
- ControllerModul mit onboard ESP32:
Der ESP32 übernimmt eine Vielzahl von OCS2-Signalen (Eingänge, Ausgänge, Joystick, Taster, etc.) und sendet diese via SmartSerial an LinuxCNC.- Die Software befindet sich bereits in einem funktionsfähigen Zustand und kann hier auf GitHub gefunden werden: OCS2-Controller mit Mesa-ESP32-SmartSerial.
- Funktionsfähiger Zustand bedeutet allerdings, dass die Software noch sehr prototypisch ist – viel Debug-Code, keine feste Struktur und etwas unübersichtlich. Aber hey, sie funktioniert! Die Daten werden erfolgreich gesendet und können in LinuxCNC angezeigt und genutzt werden.
Was noch fehlt:
- Refactoring der Software für mehr Struktur und Übersichtlichkeit.
- Erstellung einer passenden LinuxCNC-Konfiguration, um die Signale nutzen zu können:
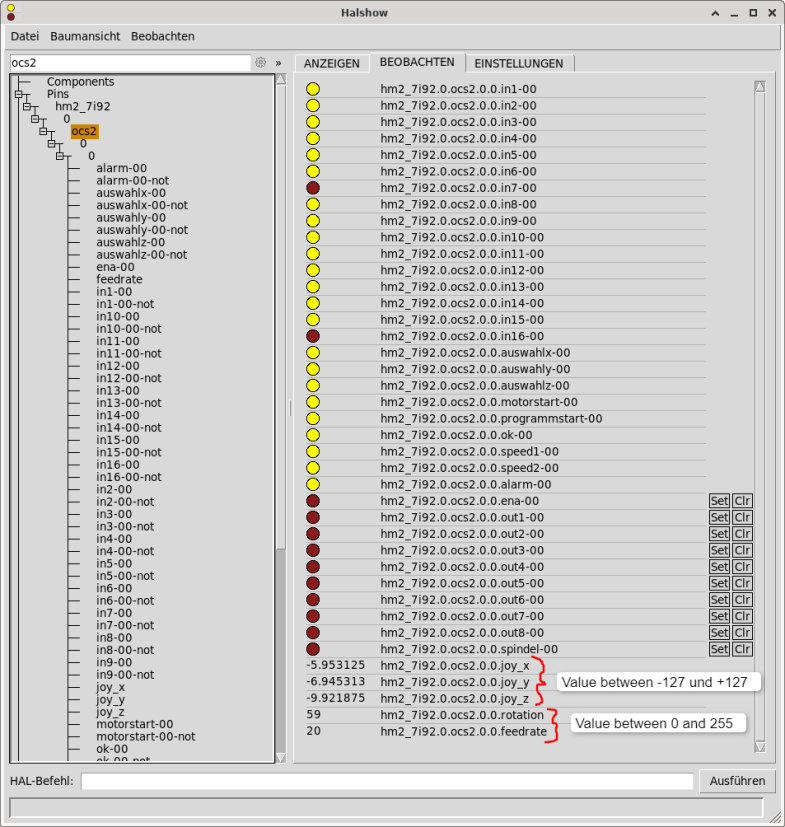
- Die Eingänge, Ausgänge sowie der Joystick (angeschlossen am OCS2) kommen alle in LinuxCNC an. Allerdings fehlt mir das Wissen, um eine vollständige Konfiguration für LinuxCNC zu erstellen, mit der diese Signale direkt genutzt werden können.
Alle relevanten Dateien findet ihr hier: ControllerModule-Daten. Darin enthalten sind:
- Das EasyEDA-Projekt
- Produktionsdateien (Gerber, BOM, Pick & Place)
- Schema
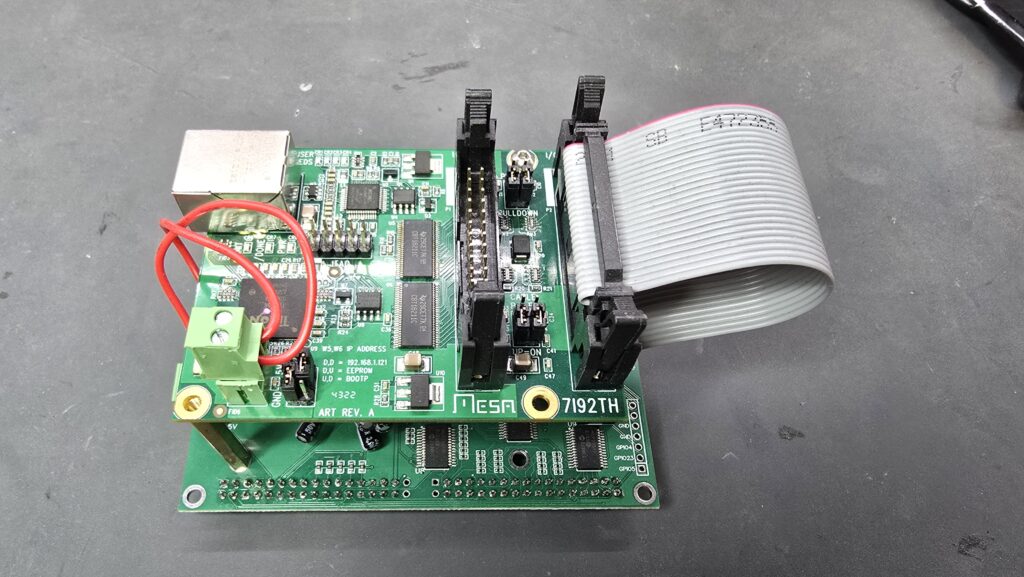
- Bitfiles für die 7192t Mesa Karte
- Konfiguration zur Erstellung eines Bitfiles
- u.v.m.
Warum geht es momentan nicht weiter?
Zum einen fehlt mir einfach die Zeit, und zum anderen kenne ich mich nicht genug mit LinuxCNC aus und möchte mich nur dafür nicht extra tief einarbeiten. Ich selbst nutze LinuxCNC nicht aktiv, da für meine Projekte einfache Softwarelösungen wie GRBL oder Estlcam vollkommen ausreichen. Auch wenn LinuxCNC zweifellos um ein Vielfaches leistungsfähiger ist, stellt es mich jedes Mal wieder vor Herausforderungen, wenn ich mich damit beschäftigen muss. 😀
Vielleicht findet ja jemand von euch in den Dateien nützliche Informationen und kann damit weiterarbeiten.
Hier noch ein Video zu einem älteren Prototyp: